《計算機視覺中的多視圖幾何》(計算機視覺中的多視圖幾何)掃描版[PDF] 簡介: 中文名 : 計算機視覺中的多視圖幾何 原名 : 計算機視覺中的多視圖幾何 作者 : 哈特利 圖書分類 : 網絡 資源格式 : PDF 版本 : 掃描版 出版社 : 安徽大學出版社 書號 : 9787810525039 發行時間 : 2002年08月 地區 : 美國 語言 : 英文 簡介 : 內容簡介: 本書全面介紹了近10年來發展的基於幾何的計算機視覺計算方
"《計算機視覺中的多視圖幾何》(計算機視覺中的多視圖幾何)掃描版[PDF]"介紹
中文名: 計算機視覺中的多視圖幾何
原名: 計算機視覺中的多視圖幾何
作者: 哈特利
圖書分類: 網絡
資源格式: PDF
版本: 掃描版
出版社: 安徽大學出版社
書號: 9787810525039
發行時間: 2002年08月
地區: 美國
語言: 英文
簡介:
內容簡介:
本書全面介紹了近10年來發展的基於幾何的計算機視覺計算方法及其數學基礎。除了上述內容外,其中多攝像機視圖幾何及其計算方法,值得讀者關注。這是因為當前計算機的性能價格比大大提高,使人們有條件在視覺系統中使用更多的攝像機,以利用冗余的信息,來換取系統對噪聲的魯棒性。系統對噪聲的魯棒性一直是實用計算機視覺系統的瓶頸問題,解決該問題的可能的辦法是:提高攝像機的分辨率、多攝像機方法和近年來大量引進的統計最優化魯棒算法(本書許多章節也有描述)。
本書涵蓋了攝像機投影矩陣、基本矩陣和三焦點張量的幾何原理、和它們的代數表達,並配有實際的例子,如它們在由多幅圖像進行景物重構中的應用。本書對我國專門從事計算機視覺研究的讀者有較好的參考價值。此外,從事相關數學領域研究的人士也值得一讀。
圖書信息:
作 者: []RichardHartley,[]A
出 版 社: 安徽大學出版社
條 形 碼: 9787810525039 ; 978-7-81052-503-9
I S B N : 9787810525039
出版時間: 2002-08
開 本: 26cm
頁 數: 468
引用Oliver Faugeras的評價:
I must leave the readers of the book to answer this question, and be content with saying that no designer of systems using cameras hooked to computers that will be built in the foreseeable future can ignore this work. This is perhaps a step in the direction of defining what it means for a computer to see.
內容截圖:
目錄:
序
原序
前言
第0篇 基礎知識:射影幾何、變換和估計
本篇大綱
第1章 2D射影幾何和變換
1.1 平面幾何
1.2 2D射影平面
1.3 射影變換
1.4 變換的層次
1.5 lD射影幾何
1.6 射影平面的拓撲
1.7 從圖像恢復仿射和度量性質
1.8 二次曲線的其他性質
1.9 不動點與直線
1.10 結束語
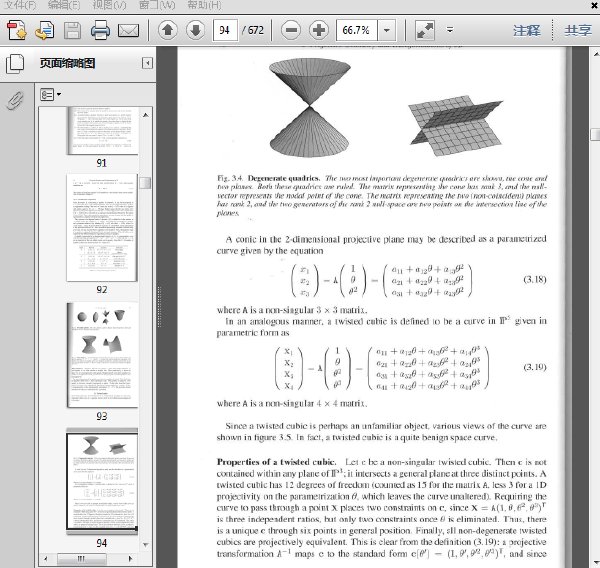
第2章 3D射影幾何和變換
2.1 點和射影變換
2.2 平面、直線和二次曲面的表示和變換
2.3 三次繞線
2.4 變換的層次
2.5 無窮遠平面
2.6 絕對二次曲線
2.7 絕對對偶二次曲面
2.8 結束語
第3章 估計——2D射影變換
3.1 直接線性變換(DLT)算法
3.2 不同的代價函數
3.3 統計代價函數和最大似然估計
3.4 變換不變性和歸一化
3.5 迭代最小化方法
3.6 算法的實驗比較
3.7 魯棒估計
3.8 單應的自動計算
3.9 結束語
第4章 算法評價和誤差分析
4.1 性能的界定
4.2 變換估計的協方差
4.3 協方差估計的蒙特卡洛法
4.4 結束語
第1篇 攝像機幾何和單視圖幾何
本篇大綱
第5章 攝像機模型
5.1. 有限攝像機
5.2 射影攝像機
5.3 無窮遠攝像機
5.4 其他攝像機模型
5.5 結束語
第6章 計算攝像機矩陣P
6.1 基本方程
6.2 幾何誤差
6.3 受限攝像機估計
6.4 徑向失真
......
原名: 計算機視覺中的多視圖幾何
作者: 哈特利
圖書分類: 網絡
資源格式: PDF
版本: 掃描版
出版社: 安徽大學出版社
書號: 9787810525039
發行時間: 2002年08月
地區: 美國
語言: 英文
簡介:
內容簡介:
本書全面介紹了近10年來發展的基於幾何的計算機視覺計算方法及其數學基礎。除了上述內容外,其中多攝像機視圖幾何及其計算方法,值得讀者關注。這是因為當前計算機的性能價格比大大提高,使人們有條件在視覺系統中使用更多的攝像機,以利用冗余的信息,來換取系統對噪聲的魯棒性。系統對噪聲的魯棒性一直是實用計算機視覺系統的瓶頸問題,解決該問題的可能的辦法是:提高攝像機的分辨率、多攝像機方法和近年來大量引進的統計最優化魯棒算法(本書許多章節也有描述)。
本書涵蓋了攝像機投影矩陣、基本矩陣和三焦點張量的幾何原理、和它們的代數表達,並配有實際的例子,如它們在由多幅圖像進行景物重構中的應用。本書對我國專門從事計算機視覺研究的讀者有較好的參考價值。此外,從事相關數學領域研究的人士也值得一讀。
圖書信息:
作 者: []RichardHartley,[]A
出 版 社: 安徽大學出版社
條 形 碼: 9787810525039 ; 978-7-81052-503-9
I S B N : 9787810525039
出版時間: 2002-08
開 本: 26cm
頁 數: 468
引用Oliver Faugeras的評價:
I must leave the readers of the book to answer this question, and be content with saying that no designer of systems using cameras hooked to computers that will be built in the foreseeable future can ignore this work. This is perhaps a step in the direction of defining what it means for a computer to see.
內容截圖:
目錄:
序
原序
前言
第0篇 基礎知識:射影幾何、變換和估計
本篇大綱
第1章 2D射影幾何和變換
1.1 平面幾何
1.2 2D射影平面
1.3 射影變換
1.4 變換的層次
1.5 lD射影幾何
1.6 射影平面的拓撲
1.7 從圖像恢復仿射和度量性質
1.8 二次曲線的其他性質
1.9 不動點與直線
1.10 結束語
第2章 3D射影幾何和變換
2.1 點和射影變換
2.2 平面、直線和二次曲面的表示和變換
2.3 三次繞線
2.4 變換的層次
2.5 無窮遠平面
2.6 絕對二次曲線
2.7 絕對對偶二次曲面
2.8 結束語
第3章 估計——2D射影變換
3.1 直接線性變換(DLT)算法
3.2 不同的代價函數
3.3 統計代價函數和最大似然估計
3.4 變換不變性和歸一化
3.5 迭代最小化方法
3.6 算法的實驗比較
3.7 魯棒估計
3.8 單應的自動計算
3.9 結束語
第4章 算法評價和誤差分析
4.1 性能的界定
4.2 變換估計的協方差
4.3 協方差估計的蒙特卡洛法
4.4 結束語
第1篇 攝像機幾何和單視圖幾何
本篇大綱
第5章 攝像機模型
5.1. 有限攝像機
5.2 射影攝像機
5.3 無窮遠攝像機
5.4 其他攝像機模型
5.5 結束語
第6章 計算攝像機矩陣P
6.1 基本方程
6.2 幾何誤差
6.3 受限攝像機估計
6.4 徑向失真
......
相關資源:


- [其他圖書]《擒拿法真傳秘訣》掃描版[PDF]
- [其他圖書]《變態心理學與心理治療(第3版)》(Abnormal Ps
- [計算機與網絡]《圖靈程序設計叢書:程序員的數學》掃描版[PDF]
- [計算機與網絡]《攝影師的視界:邁克爾•弗裡曼攝影構圖與設計》掃描版[PDF]
- [生活圖書]《吃對食物健康100分》掃描版[PDF]
- [文學圖書]《街巷雅趣》(董夢知)掃描版[PDF]
- [計算機與網絡]《計算機在教育中的應用》文字版[PDF]
- [人文社科]《名畫密碼:200幅世界名畫欣賞揭秘》(李娜 & 黃續)掃描版[PDF]
- [人文社科]《曹操大傳》(曹仲懷)文字版[PDF]
- [其他圖書]《【中國古代將帥智慧之光(全七冊)】》PDF
- [電腦基礎]幾何及建築制圖
- [計算機與網絡]《鋒利的SQL》掃描版[PDF]
- [行業軟件]《疲勞壽命分析軟件》(LMS.FALANCS.V2.13)[Bin]
- [其他資源綜合]私藏的美女圖片
- [人文社科]《日本參謀本部滿蒙國防計劃意見書》((日)金谷
- [英語學習資料]《新日語 進階日本語課程 MP3教程光盤》[MP3]
- [其他圖書]《經穴斷面解剖圖解·下肢》(·嚴振國)掃描版[PDF]
- [應用軟件]《圖片浏覽編輯軟件》(Accessory Software Picture Viewer Max 7)v7.DC121011/含注冊碼[壓縮包]
- [應用軟件]《電腦萬能專家 V6.13裝機必備版 》 V6.13 裝機必備版,應用軟件、資源下載
- [光盤游戲]《遙仰凰華》(Kanishino) CLONE版[光盤鏡像]
- 《面向對象軟件工程》(Object-Oriented Software Engineering Using UML, Patterns, and Java)第3版[EPUB]
- 《程序設計語言- 實踐之路》(Programming Language P
- 《After Effects7.0實用技術詳解》掃描版[PDF]
- 《CouchDB權威指南》(CouchDB: The Definitive Guide (Time
- 《電腦辦公》高清文字版[PDF]
- 《變身PPT高手:PowerPoint核心關鍵技術解析》掃描版[PDF]
- 《Visual C# 2008大學教程(第三版)》(Visual C# 2008 How to Program, 3rd Edition)掃描版[PDF]
- 《內核漏洞的利用與防范》(A Guide to Kernel Exploitation: Attacking the Core)掃描版[PDF]
- 《Linux服務器配置全程實錄》掃描版[PDF]
- 《數學之美》影印版[PDF]
- 《Oracle DBA手記:數據庫診斷案例與性能優化實踐》掃描版[PDF]
- 《色彩搭配設計師培訓教程3級》掃描版[PDF]
免責聲明:本網站內容收集於互聯網,本站不承擔任何由於內容的合法性及健康性所引起的爭議和法律責任。如果侵犯了你的權益,請通知我們,我們會及時刪除相關內容,謝謝合作! 聯系信箱:[email protected]
Copyright © 電驢下載基地 All Rights Reserved