電驢下載基地 >> 图书资源 >> 計算機與網絡 >> 《自動駕駛智能汽車:理論,算法和實現》(Autonomous Intelligent Vehicles: Theory, Algorithms, and Implementation)英文文字版[PDF]
| 《自動駕駛智能汽車:理論,算法和實現》(Autonomous Intelligent Vehicles: Theory, Algorithms, and Implementation)英文文字版[PDF] | |
|---|---|
| 下載分級 | 图书资源 |
| 資源類別 | 計算機與網絡 |
| 發布時間 | 2017/7/11 |
| 大 小 | - |
《自動駕駛智能汽車:理論,算法和實現》(Autonomous Intelligent Vehicles: Theory, Algorithms, and Implementation)英文文字版[PDF] 簡介: 中文名 : 自動駕駛智能汽車:理論,算法和實現 原名 : Autonomous Intelligent Vehicles: Theory, Algorithms, and Implementation 作者 : Hong Cheng 圖書分類 : 軟件 資源格式 : PDF 版本 : 英文文字版 出版社 : Springer 書號 : 978-1-4471-2279-1 發
電驢資源下載/磁力鏈接資源下載:
全選
"《自動駕駛智能汽車:理論,算法和實現》(Autonomous Intelligent Vehicles: Theory, Algorithms, and Implementation)英文文字版[PDF]"介紹
中文名: 自動駕駛智能汽車:理論,算法和實現
原名: Autonomous Intelligent Vehicles: Theory, Algorithms, and Implementation
作者: Hong Cheng
圖書分類: 軟件
資源格式: PDF
版本: 英文文字版
出版社: Springer
書號: 978-1-4471-2279-1
發行時間: 2011年
地區: 美國
語言: 英文
簡介:
內容介紹:
Autonomous intelligent vehicles pose unique challenges in robotics, that encompass issues of environment perception and modeling, localization and map building, path planning and decision-making, and motion control. This important text/reference presents state-of-the-art research on intelligent vehicles, covering not only topics of object/obstacle detection and recognition, but also aspects of vehicle motion control. With an emphasis on both high-level concepts, and practical detail, the text links theory, algorithms, and issues of hardware and software implementation in intelligent vehicle research. Topics and features: Presents a thorough introduction to the development and latest progress in intelligent vehicle research, and proposes a basic frameworkProvides detection and tracking algorithms for structured and unstructured roads, as well as on-road vehicle detection and tracking algorithms using boosted Gabor featuresDiscusses an approach for multiple sensor-based multiple-object tracking, in addition to an integrated DGPS/IMU positioning approachExamines a vehicle navigation approach using global viewsIntroduces algorithms for lateral and longitudinal vehicle motion controlAn essential reference for researchers in the field, the broad coverage of all aspects of this research will also appeal to graduate students of computer science and robotics who are interested in intelligent vehicles.
作者介紹:
Dr. Hong Cheng is Professor in the School of Automation Engineering, and Director of the Pattern Recognition and Machine Intelligence Institute at the University of Electronic Science and Technology of China.
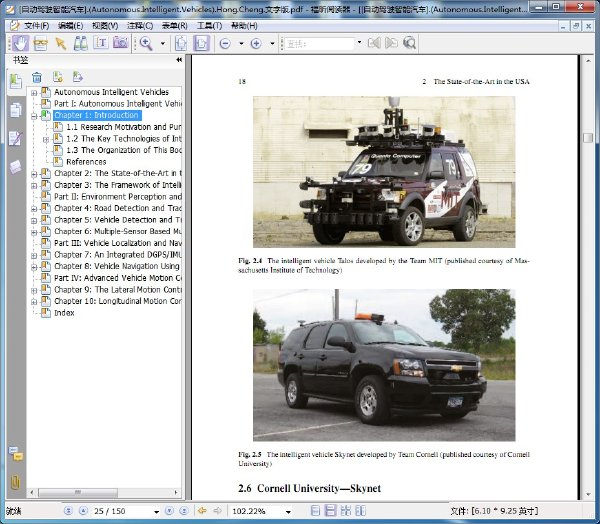
內容截圖:
目錄:
Chapter 1: Introduction
Chapter 2: The State-of-the-Art in the USA
Chapter 3: The Framework of Intelligent Vehicles
Chapter 4: Road Detection and Tracking
Chapter 5: Vehicle Detection and Tracking
Chapter 6: Multiple-Sensor Based Multiple-Object Tracking
Chapter 7: An Integrated DGPS/IMU Positioning Approach
Chapter 8: Vehicle Navigation Using Global Views
Chapter 9: The Lateral Motion Control for Intelligent Vehicles
Chapter 10: Longitudinal Motion Control for Intelligent Vehicles
原名: Autonomous Intelligent Vehicles: Theory, Algorithms, and Implementation
作者: Hong Cheng
圖書分類: 軟件
資源格式: PDF
版本: 英文文字版
出版社: Springer
書號: 978-1-4471-2279-1
發行時間: 2011年
地區: 美國
語言: 英文
簡介:
內容介紹:
Autonomous intelligent vehicles pose unique challenges in robotics, that encompass issues of environment perception and modeling, localization and map building, path planning and decision-making, and motion control. This important text/reference presents state-of-the-art research on intelligent vehicles, covering not only topics of object/obstacle detection and recognition, but also aspects of vehicle motion control. With an emphasis on both high-level concepts, and practical detail, the text links theory, algorithms, and issues of hardware and software implementation in intelligent vehicle research. Topics and features: Presents a thorough introduction to the development and latest progress in intelligent vehicle research, and proposes a basic frameworkProvides detection and tracking algorithms for structured and unstructured roads, as well as on-road vehicle detection and tracking algorithms using boosted Gabor featuresDiscusses an approach for multiple sensor-based multiple-object tracking, in addition to an integrated DGPS/IMU positioning approachExamines a vehicle navigation approach using global viewsIntroduces algorithms for lateral and longitudinal vehicle motion controlAn essential reference for researchers in the field, the broad coverage of all aspects of this research will also appeal to graduate students of computer science and robotics who are interested in intelligent vehicles.
作者介紹:
Dr. Hong Cheng is Professor in the School of Automation Engineering, and Director of the Pattern Recognition and Machine Intelligence Institute at the University of Electronic Science and Technology of China.
內容截圖:
目錄:
Chapter 1: Introduction
Chapter 2: The State-of-the-Art in the USA
Chapter 3: The Framework of Intelligent Vehicles
Chapter 4: Road Detection and Tracking
Chapter 5: Vehicle Detection and Tracking
Chapter 6: Multiple-Sensor Based Multiple-Object Tracking
Chapter 7: An Integrated DGPS/IMU Positioning Approach
Chapter 8: Vehicle Navigation Using Global Views
Chapter 9: The Lateral Motion Control for Intelligent Vehicles
Chapter 10: Longitudinal Motion Control for Intelligent Vehicles
- 上一頁:《GPU精粹2.高性能圖形芯片和通用計算機編程技巧》(GPU Gems 2:Programming Techniques for High-Performance Graphics and General-Purpose Computation)掃描版[PDF]
- 下一頁:《新概念C語言》掃描版[PDF]
相關資源:



- [計算機與網絡]《Struts 2權威指南--基於WebWork核心的MVC開發》(李剛)掃描版[PDF]
- [人文社科]《私法精神與制度選擇:大陸法私法古典模式的歷史含義》(易繼明)掃描版[PDF]
- [計算機與網絡]《挖掘社交網絡》(Mining the Social Web: Analyzing Data from Facebook, Twitter, LinkedIn, and Other Social Media Sites)英文文字版/EPUB/更新源代碼[PDF]
- [其他圖書]《四式太極拳競賽套路》掃描版[PDF]
- [經濟管理]《偉大的博弈:華爾街金融帝國的崛起(1653-2011)珍藏版》掃描版[PDF]
- [人文社科]《唐宋茶業經濟》(孫洪升)掃描版[PDF]
- [其他圖書]《建築水彩畫》(Watercolourists Guide to Painting Buildings by Richard Taylor)[PDF]
- [人文社科]《死亡公園》(Deadwood Park)[DVDRip]
- [人文社科]《中國文物定級圖典:一級品(下卷)》掃描版[P
- [文學圖書]《小女子的麻辣江湖 》掃描版[PDF]
- [生活圖書]《自然太極拳》掃描版[PDF]
- [電腦基礎]《Rhinoceros電腦輔助工業設計與制造》[PDF]
- [硬盤游戲]《天空紙牌》(Air Solitaire)v1.0.3.0硬盤版[壓縮包]
- [人文社科]《天下戰國人物正解》[PDF]
- [網絡游戲]《穿越火線》女王降臨版完整客戶端
- [少兒圖書]《小魔女藍小魚2:陸老師的秘密》掃描版[PDF]
- [生活圖書]《代表終極男士健身雜志-快速增加肌肉》(Reps
- [學習課件]《大棋局:美國的首要地位及其地緣戰略》((美)布熱津斯基)掃描版[PDF] 資料下載
- [小說圖書]韓寒《告白與告別》PDF(非掃描)
- [多媒體類]《軟音源音色盤—海島之聲》(Zero-G Sounds Of Polynesia)v1.0[ISO]
- 《黑客調試技術揭密》(Hacker Debugging Uncovered)((美)Kris Kaspersky)中譯本,掃描版[PDF]
- 《EJB3.0 入門經典》掃描版[PDF]
- 《傻瓜操作系統系列》(Operation System for Dummies)文字版[PDF]
- 《VRay渲染巨匠火星風暴 第2版》彩圖版[PDF]
- 《Photoshop專業摳圖技法》掃描版[PDF]
- 《微軟.NET程序的加密與解密》掃描版[PDF]
- 《Cisco ISP必備手冊》(Cisco ISP Essentials )(Barry Raveendran Greene & Philip Smith)掃描版[PDF]
- 《C陷阱與缺陷》(C Traps and Pitfalls)掃描版[PDF]
- 《Ruby袖珍參考手冊》(Ruby Pocket Reference)英文文字版[PDF]
- 《Matlab揭秘》(David McMahon)[PDF]
- 《電腦硬道理——電腦醫院》掃描版[PDF]
- 《網絡安全專家·網絡安全專家:黑客入侵網頁攻防修煉》掃描版[PDF]
免責聲明:本網站內容收集於互聯網,本站不承擔任何由於內容的合法性及健康性所引起的爭議和法律責任。如果侵犯了你的權益,請通知我們,我們會及時刪除相關內容,謝謝合作! 聯系信箱:[email protected]
Copyright © 電驢下載基地 All Rights Reserved