《精通 Android 4》(Pro Android 4)英文版[EPUB] 簡介: 中文名 : 精通 Android 4 原名 : Pro Android 4 作者 : Daniel W. Lewis Komatineni 圖書分類 : 軟件 資源格式 : EPUB 版本 : 英文版 出版社 : Daniel W. Lewis Komatineni 書號 : 0130615897 發行時間 : 2002年 地區 : 美國 語言 : 英文 簡介 :
電驢資源下載/磁力鏈接資源下載:
- 下載位址: [www.ed2k.online]Fundamentals.Of.Embedded.Software.-.Where.C.And.Assembly.Meet.-.Daniel.W.Lewis.(Prentice.Hall.-2002).pdf
- 下載位址: [www.ed2k.online]Pro.Android.4,.Satya.Komatineni,.Dave.MacLean,.Apress,.2012.epub
- 下載位址: [www.ed2k.online]Beginning.Android.4,.Grant.Allen,.Apress,.2012.epub
- 下載位址: [www.ed2k.online]Decompiling.Android,.Godfrey.Nolan,.Apress,.2012.pdf
全選
"《精通 Android 4》(Pro Android 4)英文版[EPUB]"介紹
中文名: 精通 Android 4
原名: Pro Android 4
作者: Daniel W. Lewis
Komatineni
圖書分類: 軟件
資源格式: EPUB
版本: 英文版
出版社: Daniel W. Lewis
Komatineni
書號: 0130615897
發行時間: 2002年
地區: 美國
語言: 英文
簡介:
用 Foxit Reader 最新版打開 pdf
內容介紹:
本書是對高等院校本科二年級計算機組成原理與匯編語言程序設計的傳統教材的全新替代版。本書以實踐中最常運用的方式講解匯編語言——實現小型、快速或特殊目的的例程,這些例程由主程序(高級語言編寫,如C)調用。通過運用嵌入式軟件環境,本書介紹多線程程序設計、可搶占式系統與非可搶占式系統、共享資源和調度,從而為操作系統、實時系統、計算機網絡及基於多處理器的設計等後續課程提供了堅實的基礎。
本書將幫助讀者:理解通常為人們所忽視的二進制表示的後果和局限性問題;運用定點(而非浮點)實數實現快速實數運算;加強對於作用域、參數傳遞、遞歸和內存分配的理解;運用C語言的特性(如位操作和變量訪問),這些特性在嵌入式軟件中廣泛應用;編寫Intel x86保護模式下的匯編函數,由C程序調用;估算不同類型輸入/輸出程序設計的最大數據速率和等待時間;管理多線程、共享資源和臨界區;開發程序設計實例,以避免優先級倒置、死鎖和共享內存問題。
本書適用於高等院校工科各專業本科嵌入式計算機系統程序設計、C語言程序設計及匯編語言程序設計類課程,也可供相關技術人員學習參考。
內容簡介:
目錄:
Preface
Chapter 1 Introduction
1.1 What is an Embedded System?
1.2 What's Unique About the Design Goals for Embedded Software?
1.3 What Does "Real-Time" Mean?
1.4 What Does "Multitasking" Mean?
1.5 How Powerful Are Embedded Processors?
1.6 What Programming Languages Are Used?
1.7 What Is a "Real-Time Kernel"?
1.8 How Is Building an Embedded Application Unique?
1.9 How Big Are Typical Embedded Programs?
1.10 The Software Used in This Book
Problems
Chapter 2 Data Representation
2.1 Fixed-Precision Binary Numbers
2.1.1 Positional Number Systems
2.1.2 Binary-to-Decimal Conversion
2.1.3 Decimal-to-Binary Conversion
2.1.4 Counting
2.1.5 Fixed Precision and Rollover
2.1.6 Hexadecimal Representation
2.2 Binary Representation of Integers
2.2.1 Signed Integers
2.2.2 Positive and Negative Representations of the Same Magnitude
2.2.3 Interpreting the Value of a 2's-Complement Number
2.2.4 More on Range and Overflow
2.2.5 2's Complement and Hardware Complexity
2.3 Binary Representation of Real Numbers
2.3.1 Fixed-Point Representation
2.3.2 Fixed-Point Using a Universal 16.16 Format
2.3.3 Fixed-Point Using a Universal 32.32 Format
2.3.4 Floating-Point Representation
2.4 ASCII Representation of Text
2.5 Binary-Coded Decimal (BCD)
Problems
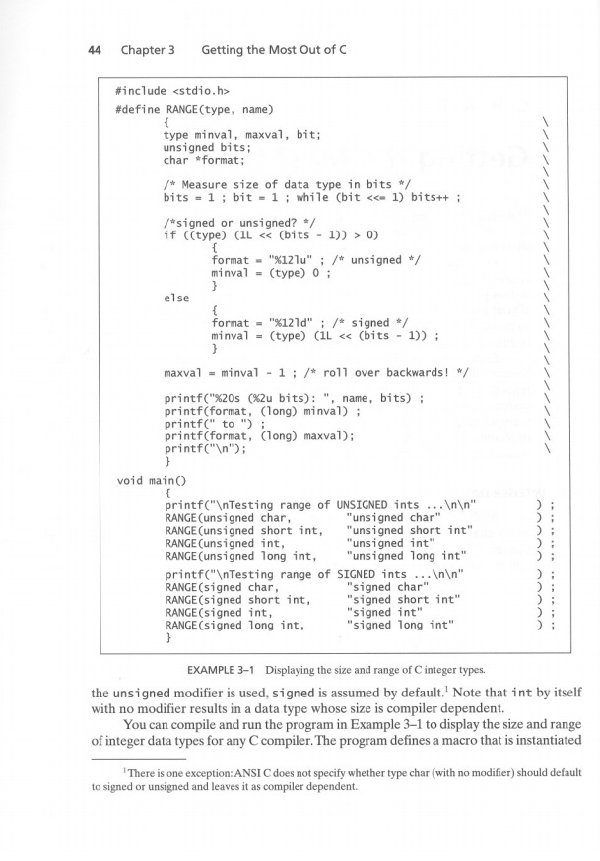
Chapter 3 Getting the Most Out of C
3.1 Integer Data Types
3.2 Mixing Data Types
3.3 Useful Typedefs and Defines
3.4 Manipulating Bits in Memory
3.4.1 Testing Bits
3.4.2 Setting, Clearing, and Inverting Bits
3.4.3 Extracting Bits
3.4.4 Inserting Bits
3.5 Manipulating Bits in I/O Ports
3.5.1 Write-Only I/O Ports
3.5.2 Ports Differentiated by Reads Versus Writes
3.5.3 Ports Differentiated by Sequential Access
3.5.4 Ports Differentiated by Bits in the Written Data
3.6 Accessing Memory-Mapped I/O Devices
3.6.1 Accessing Data Through a Pointer
3.6.2 Arrays, Pointers, and the "Address of" Operator
3.7 Structures
3.7.1 Packed Structures
3.7.2 Bit Fields
3.8 Variant Access
3.8.1 Casting the Address of an Object
3.8.2 Using Unions
Problems
Chapter 4 A Programmer's View of Computer Organization
4.1 Memory
4.2 The Central Processing Unit (CPU)
4.2.1 The Arithmetic and Logic Unit (ALU)
4.2.2 Other Registers
4.2.3 The Control Unit
4.3 Input/Output (I/O)
4.4 Introduction to the Intel Architecture
4.4.1 Instruction Formats
4.4.2 Instruction Operands
4.4.3 Operand Restrictions
4.4.4 Registers
4.4.5 The Stack
4.5 The Intel Real Mode Architecture
4.5.1 Segmented Addressing
4.5.2 Addressing Modes
4.6 The Intel Protected Mode Architecture
4.6.1 Segment Registers and The Global Descriptor Table
4.6.2 The Flat Memory Model
4.6.3 Addressing Modes
4.7 Operand and Address-Size Override Prefixes
4.8 The Intel Data Manipulation Instructions
4.8.1 Data Movement, Stack, and I/O Instructions
4.8.2 Arithmetic Instructions
4.8.3 Bitwise Instructions
4.8.4 Shift Instructions
Problems
Chapter 5 Mixing C and Assembly
5.1 Programming in Assembly
5.2 Register Usage Conventions
5.3 Typical Use of Addressing Options
5.3.1 Accessing Data Whose Address is a Constant
5.3.2 Accessing Data Whose Address is a Variable
5.4 Instruction Sequencing
5.4.1 Compound Conditionals
5.4.2 If-Then-Else Statements
5.4.3 Building Loops
5.4.4 Faster Loops with String Instructions
5.5 Procedure Call and Return
5.6 Parameter Passing
5.7 Retrieving Parameters
5.8 Everything is Pass by Value
5.9 Temporary Variables
Problems
Chapter 6 Input/Output Programming
6.1 The Intel I/O Instructions
6.2 Synchronization, Transfer Rate, and Latency
6.3 Polled Waiting Loops
6.4 Interrupt-Driven I/O
6.4.1 The Hardware Response
6.4.2 The Interrupt Service Routine
6.4.3 Programmable Interrupt Controllers
6.4.4 Buffers and Queues
6.4.5 Writing Interrupt Service Routines in Assembly
6.4.6 Writing Interrupt Service Routines in C
6.4.7 Nonmaskable Interrupts
6.4.8 Software Interrupts
6.4.9 Exceptions
6.5 Direct Memory Access
6.5.1 Double Buffering
6.6 Comparison of Methods
Problems
Chapter 7 Concurrent Software
7.1 Foreground/Background Systems
7.1.1 Thread State and Serialization
7.1.2 Managing Latency
7.1.3 Preventing Interrupt Overrun
7.1.4 Moving Work into the Background
7.2 Multithreaded Programming
7.2.1 Concurrent Execution of Independent Threads
7.2.2 Context Switching
7.2.3 Nonpreemptive (Cooperative) Multitasking
7.2.4 Preemptive Multitasking
7.3 Shared Resources and Critical Sections
7.3.1 Disabling Interrupts
7.3.2 Disabling Task Switching
7.3.3 Spin Locks
7.3.4 Mutex Objects
7.3.5 Semaphores
Problems
Chapter 8 Scheduling
8.1 Thread States
8.2 Pending Threads
8.3 Context Switching
8.4 Round-Robin Scheduling
8.5 Priority-Based Scheduling
8.5.1 Priority Inversion
8.5.2 The Priority Inheritance Protocol
8.5.3 The Priority Ceiling Protocol
8.6 Assigning Priorities
8.6.1 Deadline-Driven Scheduling
8.6.2 Rate-Monotonic Scheduling
8.7 Deadlock
8.8 Watchdog Timers
Problems
Chapter 9 Memory Management
9.1 Objects in C
9.2 Scope
9.2.1 Refining Local Scope
9.2.2 Refining Global Scope
9.3 Lifetime
9.4 Automatic Allocation
9.4.1 Storage Class "Register"
9.5 Static Allocation
9.6 Three Programs to Distinguish Static from Automatic
9.6.1 Object Creation
9.6.2 Object Initialization
9.6.3 Object Destruction
9.7 Dynamic Allocation
9.7.1 Fragmentation
9.7.2 Memory Allocation Pools
9.8 Automatic Allocation with Variable Size (alloca)
9.8.1 Variable-Size Arrays
9.9 Recursive Functions and Memory Allocation
Problems
Chapter 10 Shared Memory
10.1 Recognizing Shared Objects
10.1.1 Shared Global Data
10.1.2 Shared Private Data
10.1.3 Shared Functions
10.2 Reentrant Functions
10.3 Read-Only Data
10.3.1 Type Qualifier "const"
10.4 Coding Practices to Avoid
10.4.1 Functions That Keep Internal State in Local Static Objects
10.4.2 Functions That Return the Address of a Local Static Object
10.5 Accessing Shared Memory
10.5.1 The Effect of Processor Word Size
10.5.2 Read-Only and Write-Only Access
10.5.3 Type Qualifier "volatile"
Problems
Chapter 11 System Initialization
11.1 Memory Layout
11.2 The CPU
11.2.1 Setting Up a Flat Memory Model
11.2.2 Switching into Protected Mode
11.3 C Run-Time Environment
11.3.1 Copying from ROM to RAM
11.3.2 Zeroing Uninitialized Statics
11.3.3 Setting Up a Heap
11.4 System Timer
11.4.1 Timer 0: Timer Tick
11.4.2 Timer 1: Memory Refresh
11.4.3 Timer 2: Speaker Frequency
11.5 Interrupt System
11.5.1 Initializing the IDT
11.5.2 Initializing the 8259 PICs
11.5.3 Installing a New Interrupt Service Routine
Appendix A: Contents of the CD-ROM
Appendix B: The DJGPP C/C++ Compiler
Installation
Compilation
On-Line Documentation (Info)
Appendix C: The NASM Assembler
Installation
Running NASM
Appendix D: Programming Projects
Files Required from the CD-ROM for All Applications
Files Required for Nonpreemptive Multithreaded Applications
Files Required for Preemptive Multithreaded Applications
Compiling and Assembling Your Embedded Application
Linking Your Embedded Application
Preparing the Boot Diskette
Running Your Embedded Application
Appendix E: The LIBEPC Library
Memory Layout and Initialization
Display Functions (display.c)
Window Functions (window.c)
Keyboard Functions (keyboard.c)
Speaker Functions (speaker.c)
Timer Functions (timer.c, cycles.asm)
Interrupt Vector Access Functions (init-idt.c)
Dynamic Memory Allocation Functions (heap.c)
Fixed Point (fixedpt.asm)
Interfunction Jumps (setjmp.asm)
Miscellaneous Functions (init-crt.c)
Appendix F: The Boot Loader
Index
原名: Pro Android 4
作者: Daniel W. Lewis
Komatineni
圖書分類: 軟件
資源格式: EPUB
版本: 英文版
出版社: Daniel W. Lewis
Komatineni
書號: 0130615897
發行時間: 2002年
地區: 美國
語言: 英文
簡介:
用 Foxit Reader 最新版打開 pdf
內容介紹:
本書是對高等院校本科二年級計算機組成原理與匯編語言程序設計的傳統教材的全新替代版。本書以實踐中最常運用的方式講解匯編語言——實現小型、快速或特殊目的的例程,這些例程由主程序(高級語言編寫,如C)調用。通過運用嵌入式軟件環境,本書介紹多線程程序設計、可搶占式系統與非可搶占式系統、共享資源和調度,從而為操作系統、實時系統、計算機網絡及基於多處理器的設計等後續課程提供了堅實的基礎。
本書將幫助讀者:理解通常為人們所忽視的二進制表示的後果和局限性問題;運用定點(而非浮點)實數實現快速實數運算;加強對於作用域、參數傳遞、遞歸和內存分配的理解;運用C語言的特性(如位操作和變量訪問),這些特性在嵌入式軟件中廣泛應用;編寫Intel x86保護模式下的匯編函數,由C程序調用;估算不同類型輸入/輸出程序設計的最大數據速率和等待時間;管理多線程、共享資源和臨界區;開發程序設計實例,以避免優先級倒置、死鎖和共享內存問題。
本書適用於高等院校工科各專業本科嵌入式計算機系統程序設計、C語言程序設計及匯編語言程序設計類課程,也可供相關技術人員學習參考。
內容簡介:
目錄:
Preface
Chapter 1 Introduction
1.1 What is an Embedded System?
1.2 What's Unique About the Design Goals for Embedded Software?
1.3 What Does "Real-Time" Mean?
1.4 What Does "Multitasking" Mean?
1.5 How Powerful Are Embedded Processors?
1.6 What Programming Languages Are Used?
1.7 What Is a "Real-Time Kernel"?
1.8 How Is Building an Embedded Application Unique?
1.9 How Big Are Typical Embedded Programs?
1.10 The Software Used in This Book
Problems
Chapter 2 Data Representation
2.1 Fixed-Precision Binary Numbers
2.1.1 Positional Number Systems
2.1.2 Binary-to-Decimal Conversion
2.1.3 Decimal-to-Binary Conversion
2.1.4 Counting
2.1.5 Fixed Precision and Rollover
2.1.6 Hexadecimal Representation
2.2 Binary Representation of Integers
2.2.1 Signed Integers
2.2.2 Positive and Negative Representations of the Same Magnitude
2.2.3 Interpreting the Value of a 2's-Complement Number
2.2.4 More on Range and Overflow
2.2.5 2's Complement and Hardware Complexity
2.3 Binary Representation of Real Numbers
2.3.1 Fixed-Point Representation
2.3.2 Fixed-Point Using a Universal 16.16 Format
2.3.3 Fixed-Point Using a Universal 32.32 Format
2.3.4 Floating-Point Representation
2.4 ASCII Representation of Text
2.5 Binary-Coded Decimal (BCD)
Problems
Chapter 3 Getting the Most Out of C
3.1 Integer Data Types
3.2 Mixing Data Types
3.3 Useful Typedefs and Defines
3.4 Manipulating Bits in Memory
3.4.1 Testing Bits
3.4.2 Setting, Clearing, and Inverting Bits
3.4.3 Extracting Bits
3.4.4 Inserting Bits
3.5 Manipulating Bits in I/O Ports
3.5.1 Write-Only I/O Ports
3.5.2 Ports Differentiated by Reads Versus Writes
3.5.3 Ports Differentiated by Sequential Access
3.5.4 Ports Differentiated by Bits in the Written Data
3.6 Accessing Memory-Mapped I/O Devices
3.6.1 Accessing Data Through a Pointer
3.6.2 Arrays, Pointers, and the "Address of" Operator
3.7 Structures
3.7.1 Packed Structures
3.7.2 Bit Fields
3.8 Variant Access
3.8.1 Casting the Address of an Object
3.8.2 Using Unions
Problems
Chapter 4 A Programmer's View of Computer Organization
4.1 Memory
4.2 The Central Processing Unit (CPU)
4.2.1 The Arithmetic and Logic Unit (ALU)
4.2.2 Other Registers
4.2.3 The Control Unit
4.3 Input/Output (I/O)
4.4 Introduction to the Intel Architecture
4.4.1 Instruction Formats
4.4.2 Instruction Operands
4.4.3 Operand Restrictions
4.4.4 Registers
4.4.5 The Stack
4.5 The Intel Real Mode Architecture
4.5.1 Segmented Addressing
4.5.2 Addressing Modes
4.6 The Intel Protected Mode Architecture
4.6.1 Segment Registers and The Global Descriptor Table
4.6.2 The Flat Memory Model
4.6.3 Addressing Modes
4.7 Operand and Address-Size Override Prefixes
4.8 The Intel Data Manipulation Instructions
4.8.1 Data Movement, Stack, and I/O Instructions
4.8.2 Arithmetic Instructions
4.8.3 Bitwise Instructions
4.8.4 Shift Instructions
Problems
Chapter 5 Mixing C and Assembly
5.1 Programming in Assembly
5.2 Register Usage Conventions
5.3 Typical Use of Addressing Options
5.3.1 Accessing Data Whose Address is a Constant
5.3.2 Accessing Data Whose Address is a Variable
5.4 Instruction Sequencing
5.4.1 Compound Conditionals
5.4.2 If-Then-Else Statements
5.4.3 Building Loops
5.4.4 Faster Loops with String Instructions
5.5 Procedure Call and Return
5.6 Parameter Passing
5.7 Retrieving Parameters
5.8 Everything is Pass by Value
5.9 Temporary Variables
Problems
Chapter 6 Input/Output Programming
6.1 The Intel I/O Instructions
6.2 Synchronization, Transfer Rate, and Latency
6.3 Polled Waiting Loops
6.4 Interrupt-Driven I/O
6.4.1 The Hardware Response
6.4.2 The Interrupt Service Routine
6.4.3 Programmable Interrupt Controllers
6.4.4 Buffers and Queues
6.4.5 Writing Interrupt Service Routines in Assembly
6.4.6 Writing Interrupt Service Routines in C
6.4.7 Nonmaskable Interrupts
6.4.8 Software Interrupts
6.4.9 Exceptions
6.5 Direct Memory Access
6.5.1 Double Buffering
6.6 Comparison of Methods
Problems
Chapter 7 Concurrent Software
7.1 Foreground/Background Systems
7.1.1 Thread State and Serialization
7.1.2 Managing Latency
7.1.3 Preventing Interrupt Overrun
7.1.4 Moving Work into the Background
7.2 Multithreaded Programming
7.2.1 Concurrent Execution of Independent Threads
7.2.2 Context Switching
7.2.3 Nonpreemptive (Cooperative) Multitasking
7.2.4 Preemptive Multitasking
7.3 Shared Resources and Critical Sections
7.3.1 Disabling Interrupts
7.3.2 Disabling Task Switching
7.3.3 Spin Locks
7.3.4 Mutex Objects
7.3.5 Semaphores
Problems
Chapter 8 Scheduling
8.1 Thread States
8.2 Pending Threads
8.3 Context Switching
8.4 Round-Robin Scheduling
8.5 Priority-Based Scheduling
8.5.1 Priority Inversion
8.5.2 The Priority Inheritance Protocol
8.5.3 The Priority Ceiling Protocol
8.6 Assigning Priorities
8.6.1 Deadline-Driven Scheduling
8.6.2 Rate-Monotonic Scheduling
8.7 Deadlock
8.8 Watchdog Timers
Problems
Chapter 9 Memory Management
9.1 Objects in C
9.2 Scope
9.2.1 Refining Local Scope
9.2.2 Refining Global Scope
9.3 Lifetime
9.4 Automatic Allocation
9.4.1 Storage Class "Register"
9.5 Static Allocation
9.6 Three Programs to Distinguish Static from Automatic
9.6.1 Object Creation
9.6.2 Object Initialization
9.6.3 Object Destruction
9.7 Dynamic Allocation
9.7.1 Fragmentation
9.7.2 Memory Allocation Pools
9.8 Automatic Allocation with Variable Size (alloca)
9.8.1 Variable-Size Arrays
9.9 Recursive Functions and Memory Allocation
Problems
Chapter 10 Shared Memory
10.1 Recognizing Shared Objects
10.1.1 Shared Global Data
10.1.2 Shared Private Data
10.1.3 Shared Functions
10.2 Reentrant Functions
10.3 Read-Only Data
10.3.1 Type Qualifier "const"
10.4 Coding Practices to Avoid
10.4.1 Functions That Keep Internal State in Local Static Objects
10.4.2 Functions That Return the Address of a Local Static Object
10.5 Accessing Shared Memory
10.5.1 The Effect of Processor Word Size
10.5.2 Read-Only and Write-Only Access
10.5.3 Type Qualifier "volatile"
Problems
Chapter 11 System Initialization
11.1 Memory Layout
11.2 The CPU
11.2.1 Setting Up a Flat Memory Model
11.2.2 Switching into Protected Mode
11.3 C Run-Time Environment
11.3.1 Copying from ROM to RAM
11.3.2 Zeroing Uninitialized Statics
11.3.3 Setting Up a Heap
11.4 System Timer
11.4.1 Timer 0: Timer Tick
11.4.2 Timer 1: Memory Refresh
11.4.3 Timer 2: Speaker Frequency
11.5 Interrupt System
11.5.1 Initializing the IDT
11.5.2 Initializing the 8259 PICs
11.5.3 Installing a New Interrupt Service Routine
Appendix A: Contents of the CD-ROM
Appendix B: The DJGPP C/C++ Compiler
Installation
Compilation
On-Line Documentation (Info)
Appendix C: The NASM Assembler
Installation
Running NASM
Appendix D: Programming Projects
Files Required from the CD-ROM for All Applications
Files Required for Nonpreemptive Multithreaded Applications
Files Required for Preemptive Multithreaded Applications
Compiling and Assembling Your Embedded Application
Linking Your Embedded Application
Preparing the Boot Diskette
Running Your Embedded Application
Appendix E: The LIBEPC Library
Memory Layout and Initialization
Display Functions (display.c)
Window Functions (window.c)
Keyboard Functions (keyboard.c)
Speaker Functions (speaker.c)
Timer Functions (timer.c, cycles.asm)
Interrupt Vector Access Functions (init-idt.c)
Dynamic Memory Allocation Functions (heap.c)
Fixed Point (fixedpt.asm)
Interfunction Jumps (setjmp.asm)
Miscellaneous Functions (init-crt.c)
Appendix F: The Boot Loader
Index
- 上一頁:《面向對象軟件工程》(Object-Oriented Software Engineering Using UML, Patterns, and Java)第3版[EPUB]
- 下一頁:《QTP自動化測試實踐 》掃描版[PDF]
相關資源:



- [人文社科]Yanni -《雅尼音樂會》(Yanni Live The Concert Event)[DVDRip]
- [生活圖書]《少林武術氣功自學教材》掃描版[PDF]
- [計算機與網絡]《Shell腳本專家指南 清晰版+高清300dpi版》(Expert Shell Scripting)((美)彼得)掃描版[PDF]
- [教育科技]《微分流形初步》第2版[DJVU]
- [經濟管理]《你拿什麼改變世界》掃描版[PDF]
- [生活圖書]《病從口入 — 101種不生病的吃法》掃描版[PDF]
- [教育科技]《ARCGIS地理信息系統空間分析實驗教程》掃描版
- [文學圖書]《六一詩話 白石詩說 滹南詩話》(歐陽修 & 姜夔 & 王若虛)掃描版[PDF]
- [其他圖書]《華北電網繼電保護標准化設計》高清掃描版[PDF]
- [文學圖書]《先秦文化研究》(姚政)掃描版[PDF]
- [硬盤游戲]《科林麥克雷拉力賽2005》(Colin McRae Rally 2005)[ISO]
- [其他圖書]《版面設計》(Layout: Making It Fit)(Carolyn Knight)掃描版[PDF]
- [文學圖書]《王國維文學論著三種》影印版[PDF]
- [少兒圖書]《兒童游戲大全》掃描版[PDF]
- [計算機與網絡]《Spring揭秘》掃描版[PDF]
- [應用軟件]《數字化產品開發自動化》(SIEMENS NX I
- [多媒體類]《Nero 9 多國語言光碟版》(Ahead Nero 9 Multilingual)4號更新光碟版[ISO]
- [硬盤游戲]《FIA世界汽車拉力錦標賽2011》(WRC FIA World Rally Championship 2011)完整硬盤版+3DM簡體中文漢化補丁 / 更新高壓硬盤版[壓縮包]
- [學習教程]《吉他彈奏教程: 學習演奏Brian Setzer》[光盤鏡像]
- [操作系統]《狼人-Fedora 8正式版》(Fedora 8 i386 DVD Final Release)[ISO]
- 《版本控制之道-使用CVS》(Pragmatic Version Control Using CVS )掃描版[PDF]
- 《sed與awk(第二版)》(sed & awkk, 2nd Edition)掃描
- 《Linux服務器配置全程實錄》掃描版[PDF]
- 《中文版Premiere Pro從入門到精通》掃描版[PDF]
- 《單片機應用技術實例》掃描版[PDF]
- 《編程之美——微軟技術面試心得》中文掃描版/更新源代碼[PDF]
- 《Photoshop_CS3通道與蒙版寶典》掃描版[PDF]
- 《設計師生存手冊InDesignCS4》掃描版[PDF]
- 《c#多線程參考手冊》(.net線程參考手冊)(Tobin T
- 《Linux內核編程》掃描版[PDF]
- 《Google App Engine開發》(Using Google App Engine: Start Building and Running Web Apps on Googles Infrastructure)英文文字版/更新源代碼[PDF]
- 《堆棧攻擊八層網絡安全防御》(Hack the Stack: Using Snort and Ethereal to Master the 8 Layers of an Insecure Network )[PDF]
免責聲明:本網站內容收集於互聯網,本站不承擔任何由於內容的合法性及健康性所引起的爭議和法律責任。如果侵犯了你的權益,請通知我們,我們會及時刪除相關內容,謝謝合作! 聯系信箱:[email protected]
Copyright © 電驢下載基地 All Rights Reserved