電驢下載基地 >> 其他资源 >> 電腦基礎 >> 《麻省理工學院開放課程 機電工程及計算機科學系 6.832 欠驅動機器人學》(MIT OCW Underactuated Robotics)更新至第3課/共23課[MP4]
| 《麻省理工學院開放課程 機電工程及計算機科學系 6.832 欠驅動機器人學》(MIT OCW Underactuated Robotics)更新至第3課/共23課[MP4] | |
|---|---|
| 下載分級 | 其他资源 |
| 資源類別 | 電腦基礎 |
| 發布時間 | 2017/7/13 |
| 大 小 | - |
《麻省理工學院開放課程 機電工程及計算機科學系 6.832 欠驅動機器人學》(MIT OCW Underactuated Robotics)更新至第3課/共23課[MP4] 簡介: 中文名 : 麻省理工學院開放課程 機電工程及計算機科學系 6.832 欠驅動機器人學 英文名 : MIT OCW Underactuated Robotics 資源格式 : MP4 主講人 : (美)Prof. Russell Tedrake 版本 : 更新至第3課/共23課 發行日期 : 2009年 地區 : 美國 對白語言 : 英語 文字語言 : 英文 簡介 :
電驢資源下載/磁力鏈接資源下載:
- 下載位址: [www.ed2k.online][麻省理工學院開放課程.欠驅動機器人學].MIT6_832S09lec01_300k.mp4
- 下載位址: [www.ed2k.online][麻省理工學院開放課程.欠驅動機器人學].MIT6_832S09lec02_300k.mp4
- 下載位址: [www.ed2k.online][麻省理工學院開放課程.欠驅動機器人學].MIT6_832S09lec03_300k.mp4
- 下載位址: [www.ed2k.online]勁科公司打字員招聘章程.pdf
- 下載位址: [www.ed2k.online]勁科公司廣告分成計劃簡介.pdf
全選
"《麻省理工學院開放課程 機電工程及計算機科學系 6.832 欠驅動機器人學》(MIT OCW Underactuated Robotics)更新至第3課/共23課[MP4]"介紹
中文名: 麻省理工學院開放課程 機電工程及計算機科學系 6.832 欠驅動機器人學
英文名: MIT OCW Underactuated Robotics
資源格式: MP4
主講人: (美)Prof. Russell Tedrake
版本: 更新至第3課/共23課
發行日期: 2009年
地區: 美國
對白語言: 英語
文字語言: 英文
簡介:
最近少上VC,喜歡我資源的朋友請點擊這裡郵箱訂閱我,更新都會在這裡提示。 另外不夠銅光盤的朋友也可以在這裡求資源,多人需要的資源我會通過郵箱群發。打開後要填入郵箱地址,然後再登錄郵箱確認訂閱。
內容介紹:
時至今日,移動機器人依然顯得太過保守,仍舊使用控制系統,試圖保持每時每刻的完全控制權限。人類和動物確可以依靠在一定程度上損失瞬時控制權,從而獲得更加積極的活動能力。使用非完全控制權限的方法控制非線性系統,可以使我們的機器更好的利用自然動力。
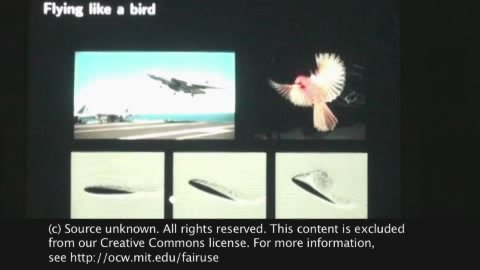
本課程討論非線性動力學和控制,欠驅動機械系統,重點是機器學習方法。主題包括非線性動態被動機器人(步行,游泳,飛行),運動規劃,部分反饋線性化,能量成形控制,分析最優控制,強化學習/近似最優控制,並影響機械設計控制。討論的例子包括從生物學和應用足行走,標准操作,水下機器人,飛行機。
Robots today move far too conservatively, using control systems that attempt to maintain full control authority at all times. Humans and animals move much more aggressively by routinely executing motions which involve a loss of instantaneous control authority. Controlling nonlinear systems without complete control authority requires methods that can reason about and exploit the natural dynamics of our machines.
This course discusses nonlinear dynamics and control of underactuated mechanical systems, with an emphasis on machine learning methods. Topics include nonlinear dynamics of passive robots (walkers, swimmers, flyers), motion planning, partial feedback linearization, energy-shaping control, analytical optimal control, reinforcement learning/approximate optimal control, and the influence of mechanical design on control. Discussions include examples from biology and applications to legged locomotion, compliant manipulation, underwater robots, and flying machines.
鳴謝
教授特德雷克要感謝約翰羅伯茨幫忙的課程和講座錄像。
Acknowledgements
Professor Tedrake would like to thank John Roberts for his help with the course and videotaping the lectures.
機電工程及計算機科學系開放課視頻供(點擊觀看)
6.00 計算機科學與程序設計導論 Introduction to Computer Science and Programming
6.001 計算機程序的構造和解釋 Structure and Interpretation of Computer Programs
6.002 電路與電子學 Circuits and Electronics
6.006 算法導論 Introduction to Algorithms
6.033 計算機系統工程 Computer System Engineering
6.035 計算機語言工程 Computer Language Engineering
6.172 軟件系統性能工程 Performance Engineering of Software Systems
6.189 多核編程入門 Multicore Programming Primer
6.450 數字通信原理 1 Principles of Digital Communications I
6.451 數字通信原理 2 Principles of Digital Communications II
6.780J 制造過程的控制 Control of Manufacturing Processes
6.832 欠驅動機器人學 Underactuated Robotics
機電工程及計算機科學系全套課件
作者介紹:
麻省理工學院(Massachusetts Institute of Technology,MIT)是美國一所綜合性私立大學。位於馬薩諸塞州的波士頓,查爾斯河(Charles River)將其與波士頓的後灣區(Back Bay)隔開。MIT無論是在美國還是全世界都有非常重要的影響力,培養了眾多對世界產生重大影響的人士,是全球高科技和高等研究的先驅領導大學。麻省理工學院的自然及工程科學在世界上享有極佳的聲譽,其管理學、經濟學、哲學、政治學、語言學也同樣優秀。由於在學術方面的卓越成就,雖然MIT不是常春籐盟校成員,MIT也常被納入Ivy Plus。
主講人
Prof. David Hardt
Prof. Duane Boning
內容截圖:

目錄:
Lecture 1: Introduction
Lecture 2: The Simple Pendulum
Lecture 3: Optimal Control of the Double Integrator
Lecture 4: Optimal Control of the Double Integrator (cont.)
Lecture 5: Numerical Optimal Control (Dynamic Programming)
Lecture 6: Acrobot and Cart-pole
Lecture 7: Swing-up Control of Acrobot and Cart-pole Systems
Lecture 8: Dynamic Programming (DP) and Policy Search
Lecture 9: Trajectory Optimization
Lecture 10: Trajectory Stabilization and Iterative Linear Quadratic Regulator
Lecture 11: Walking
Lecture 12: Walking (cont.)
Lecture 13: Running
Lecture 14: Feasible Motion Planning
Lecture 15: Global Policies from Local Policies
Lecture 16: Introducing Stochastic Optimal Control
Lecture 17: Stochastic Gradient Descent
Lecture 18: Stochastic Gradient Descent 2
Lecture 19: Temporal Difference Learning
Lecture 20: Temporal Difference Learning with Function Approximation
Lecture 21: Policy Improvement
Lecture 22: Actor-critic Methods
Lecture 23: Case Studies in Computational Underactuated Control
英文名: MIT OCW Underactuated Robotics
資源格式: MP4
主講人: (美)Prof. Russell Tedrake
版本: 更新至第3課/共23課
發行日期: 2009年
地區: 美國
對白語言: 英語
文字語言: 英文
簡介:
最近少上VC,喜歡我資源的朋友請點擊這裡郵箱訂閱我,更新都會在這裡提示。 另外不夠銅光盤的朋友也可以在這裡求資源,多人需要的資源我會通過郵箱群發。打開後要填入郵箱地址,然後再登錄郵箱確認訂閱。
內容介紹:
時至今日,移動機器人依然顯得太過保守,仍舊使用控制系統,試圖保持每時每刻的完全控制權限。人類和動物確可以依靠在一定程度上損失瞬時控制權,從而獲得更加積極的活動能力。使用非完全控制權限的方法控制非線性系統,可以使我們的機器更好的利用自然動力。
本課程討論非線性動力學和控制,欠驅動機械系統,重點是機器學習方法。主題包括非線性動態被動機器人(步行,游泳,飛行),運動規劃,部分反饋線性化,能量成形控制,分析最優控制,強化學習/近似最優控制,並影響機械設計控制。討論的例子包括從生物學和應用足行走,標准操作,水下機器人,飛行機。
Robots today move far too conservatively, using control systems that attempt to maintain full control authority at all times. Humans and animals move much more aggressively by routinely executing motions which involve a loss of instantaneous control authority. Controlling nonlinear systems without complete control authority requires methods that can reason about and exploit the natural dynamics of our machines.
This course discusses nonlinear dynamics and control of underactuated mechanical systems, with an emphasis on machine learning methods. Topics include nonlinear dynamics of passive robots (walkers, swimmers, flyers), motion planning, partial feedback linearization, energy-shaping control, analytical optimal control, reinforcement learning/approximate optimal control, and the influence of mechanical design on control. Discussions include examples from biology and applications to legged locomotion, compliant manipulation, underwater robots, and flying machines.
鳴謝
教授特德雷克要感謝約翰羅伯茨幫忙的課程和講座錄像。
Acknowledgements
Professor Tedrake would like to thank John Roberts for his help with the course and videotaping the lectures.
機電工程及計算機科學系開放課視頻供(點擊觀看)
6.00 計算機科學與程序設計導論 Introduction to Computer Science and Programming
6.001 計算機程序的構造和解釋 Structure and Interpretation of Computer Programs
6.002 電路與電子學 Circuits and Electronics
6.006 算法導論 Introduction to Algorithms
6.033 計算機系統工程 Computer System Engineering
6.035 計算機語言工程 Computer Language Engineering
6.172 軟件系統性能工程 Performance Engineering of Software Systems
6.189 多核編程入門 Multicore Programming Primer
6.450 數字通信原理 1 Principles of Digital Communications I
6.451 數字通信原理 2 Principles of Digital Communications II
6.780J 制造過程的控制 Control of Manufacturing Processes
6.832 欠驅動機器人學 Underactuated Robotics
機電工程及計算機科學系全套課件
作者介紹:
麻省理工學院(Massachusetts Institute of Technology,MIT)是美國一所綜合性私立大學。位於馬薩諸塞州的波士頓,查爾斯河(Charles River)將其與波士頓的後灣區(Back Bay)隔開。MIT無論是在美國還是全世界都有非常重要的影響力,培養了眾多對世界產生重大影響的人士,是全球高科技和高等研究的先驅領導大學。麻省理工學院的自然及工程科學在世界上享有極佳的聲譽,其管理學、經濟學、哲學、政治學、語言學也同樣優秀。由於在學術方面的卓越成就,雖然MIT不是常春籐盟校成員,MIT也常被納入Ivy Plus。
主講人
Prof. David Hardt
Prof. Duane Boning
內容截圖:
目錄:
Lecture 1: Introduction
Lecture 2: The Simple Pendulum
Lecture 3: Optimal Control of the Double Integrator
Lecture 4: Optimal Control of the Double Integrator (cont.)
Lecture 5: Numerical Optimal Control (Dynamic Programming)
Lecture 6: Acrobot and Cart-pole
Lecture 7: Swing-up Control of Acrobot and Cart-pole Systems
Lecture 8: Dynamic Programming (DP) and Policy Search
Lecture 9: Trajectory Optimization
Lecture 10: Trajectory Stabilization and Iterative Linear Quadratic Regulator
Lecture 11: Walking
Lecture 12: Walking (cont.)
Lecture 13: Running
Lecture 14: Feasible Motion Planning
Lecture 15: Global Policies from Local Policies
Lecture 16: Introducing Stochastic Optimal Control
Lecture 17: Stochastic Gradient Descent
Lecture 18: Stochastic Gradient Descent 2
Lecture 19: Temporal Difference Learning
Lecture 20: Temporal Difference Learning with Function Approximation
Lecture 21: Policy Improvement
Lecture 22: Actor-critic Methods
Lecture 23: Case Studies in Computational Underactuated Control
- 上一頁:《麻省理工學院開放課程 機電工程及計算機科學系 6.172 軟件系統性能工程》(MIT OCW Performance Engineering of Software Systems)更新至第23課/共23課[MP4]
- 下一頁:《麻省理工學院開放課程 機電工程及計算機科學系 6.450 數字通信原理 1 新版》(MIT OCW Principles of Digital Communications I)更新至第10課/共24課[MP4]
相關資源:


- [其他資源綜合]《鋼琴之森》[1-19連載中][漫畫][講談社原版][壓縮包] 資料下載
- [電腦基礎]《Hands.on.Cubase.Volume 全套三張DVD視頻教程(德語)》(Hands.on.Cubase.Volume 1-3)[DVDRip]
- [生活百科]《骨質疏松症調養與護理》掃描版[PDF] 資料下載
- [生活百科]《管人要懂心理學》掃描版[PDF] 資料下載
- [電腦基礎]《火星風暴AE視頻教學3CD》簡體中文
- [其他資源綜合]《吉他彈唱校園民謠精品大全》免費下載
- [電腦基礎]《Lynda.com 出品LightWave 10基礎培訓視頻教程》(Lynda.com.LightWave.10.Essential.Training)[光盤鏡像]
- [其他資源綜合][中級會計職稱] 2015中級課件-中級財管課件9.6日更新 百度網盤免費下載
- [其他資源綜合]《南少林絕技:陰指功》掃描版[PDF] 資料下載
- [生活百科]學會和領導說話 免費txt下載
- [人文社科]《客觀知識:一個進化論的研究》(Objective Knowledge)((英)卡爾·波普爾)中譯本,掃描版[PDF]
- [編程開發]《CodeCharge Studio》(Yessoftware CodeCharge Studio v4.2.00.040)[壓縮包]
- [應用軟件]《X
- [計算機與網絡]《精通Perl 中文高清PDF版》(OReilly Mastering Perl)掃描版[PDF]
- [應用軟件]《文件批量重命名軟件》(Mytoolsoft FileRenamer)v1.0.0[壓縮包]
- [行業軟件]精品電影,懂的來,還有一個能下載到剛上映的電影的軟件
- [計算機與網絡]《Red Hat Enterprise Linux系統管理》掃描版[PDF]
- [其他圖書]《大成拳法要集成》掃描版[PDF]
- [生活圖書]《精品花卉:名貴花卉》掃描版[PDF]
- [生活圖書]《圖解針灸大全 上有各種手法 下游諸科治療》掃描版[PDF]
- 《3ds max三維效果制作循序漸進400例》(3ds max)隨書光盤[光盤鏡像]
- 《SolidWorks視頻教程》(SolidWorks Video Tutorial Volume 2 & Volume3)[Bin]
- 《精通Authorware 7.0》PDF版.第1版
- 《黑鷹基地.VIP.ASP網頁教程》[ISO]
- 《PC游戲編程 人機博弈》
- 《photoShop CS2基礎教程》(Lynda.Com.Photoshop.CS2.Essential.Training)[Bin]
- 《精通Struts:基於MVC的Java Web設計與開發》PDF
- 《【游戲進行時-After effects教程】【2010年04月09日發布】[videocopilot系列.英文原版.001-104]》(VIDEOCOPILOT TUTORIALS FOR VFX & MOTION GRAPHICS)英文原版
- 《Flash Professional 8 Beyond the Basics》CFE 教程[Bin]
- 《Autodesk Inventor 2010 新功能介紹和解讀 DVD》2010[光盤鏡像]
- 《Illustrator CS入門與提高 》[ISO]
- 《Ajax基礎教程》(Foundations.of.Ajax)Ajax基礎教程(英文原版)
免責聲明:本網站內容收集於互聯網,本站不承擔任何由於內容的合法性及健康性所引起的爭議和法律責任。如果侵犯了你的權益,請通知我們,我們會及時刪除相關內容,謝謝合作! 聯系信箱:[email protected]
Copyright © 電驢下載基地 All Rights Reserved